Catégories
Liens
J'aime les timelapses! Cependant je les trouve un peu “creux” lorsque le cadrage est immobile. Mais déplacer l'appareil photo de façon précise et répété n'est pas forcement très facile. C'est pourquoi je souhaite créer une petite machine sur deux axes me permettant de réaliser des timelapses et autres panoramas de mes paysages préférés.
Un de mes timelapses depuis la corniche.
Pour ceux qui ne reconnaîtront pas le concept il s'agit de vidéos réalisées à l'aide de photos prises à une fréquence bien plus basse que les vidéos classiques. Par exemple une photo toutes les 5 sec. Pour un ordre d'idée, quelques exemples de fréquences de prise de vues:
Ces valeurs ne sont que des exemples et l'effet de “vitesse” ne dépend pas uniquement de la prise de vue.
Les effets de types ralenti et accéléré dépendent de deux facteurs:
Si la fréquence de projection est supérieure à celle de prise, le mouvement sera accéléré. Exactement comme l'avance rapide d'une VHS. Si la fréquence de projection est inférieur à celle de prise, le mouvement sera ralenti. Comme si on avançait image par image.
Le timelapse se base la dessus pour donner une sensation de rapidité d'un évènement. Ce n'est ni plus ni moins qu'une sorte de visionnage rapide.
L'idée d'un timelapse est d'accélérer le mouvement dans la vidéo. Faire croire qu'un évènement long (quelques minutes) voir très long (plusieurs semaines voir mois) se passe en quelques secondes. Facile. Il suffit de prendre une vidéo très longue et la passer en accéléré. Ceci peut être une possibilité. Mais plusieurs problèmes techniques s'imposent rapidement:
Une solution possible est tout simplement de changer la prise de vidéo pour une prise de photo. On gagne sur beaucoup de points:
La suite est simple. On joue sur le fait que projeter une vidéo à une fréquence plus élevée que sa prise de vues en accélère le mouvement. On affiche donc notre vidéo à 24, 30, voir 60 img/s à fin que le mouvement soit fluide à l'oeil et le tour est joué. Évidement il faut avoir prévu assez de photos…
Pour cette partie j'aime partir de la durée de mon timelapse. J'aime les timelapse plutôt courts car je fais principalement des paysages et des décors urbains avec peu voir pas de mouvement ni d'évolution (d'où ma volonté de rajouter un déplacement).
Petite séance calcul:
Jeune diplômé d'un Master en Informatique. Je me retrouve avec un peu de temps libre pour réaliser des projets personnels. J'ai toujours été attiré par l'informatique embarquée et souhaite améliorer mes compétences dans ce milieu. Couplé au plaisir que j'éprouve en réalisant des timelapse ce projet semble parfait.
C'est l'occasion de découvrir les protocoles de d'échange “bas niveau” tel que l'I2C ou UART. C'est aussi un projet complet qui requiert de trouver les bons acteurs au niveau local. Aussi bien fournisseurs de matières premières que d'équipements et de services. La découverte du LFO à d'ailleurs été un moment important de cette réalisation.
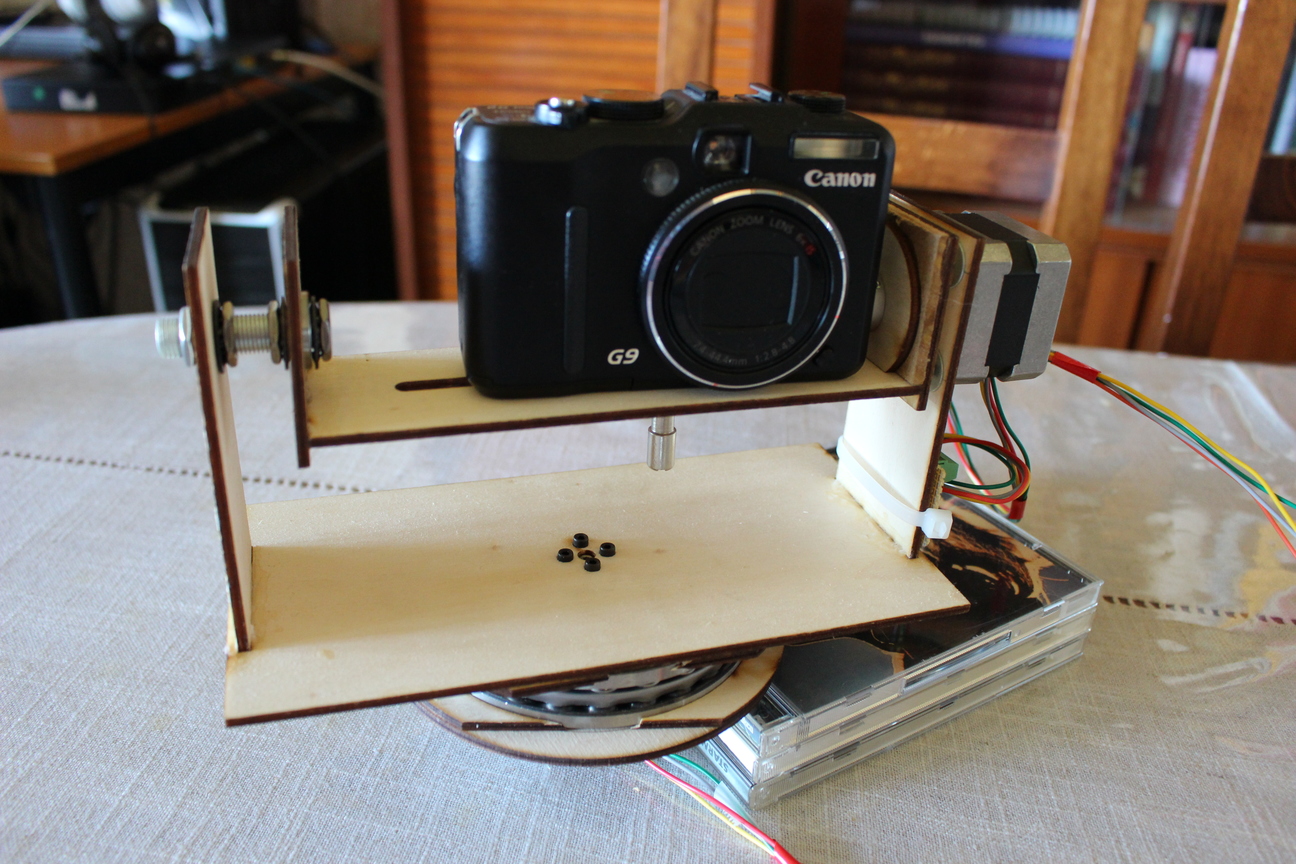
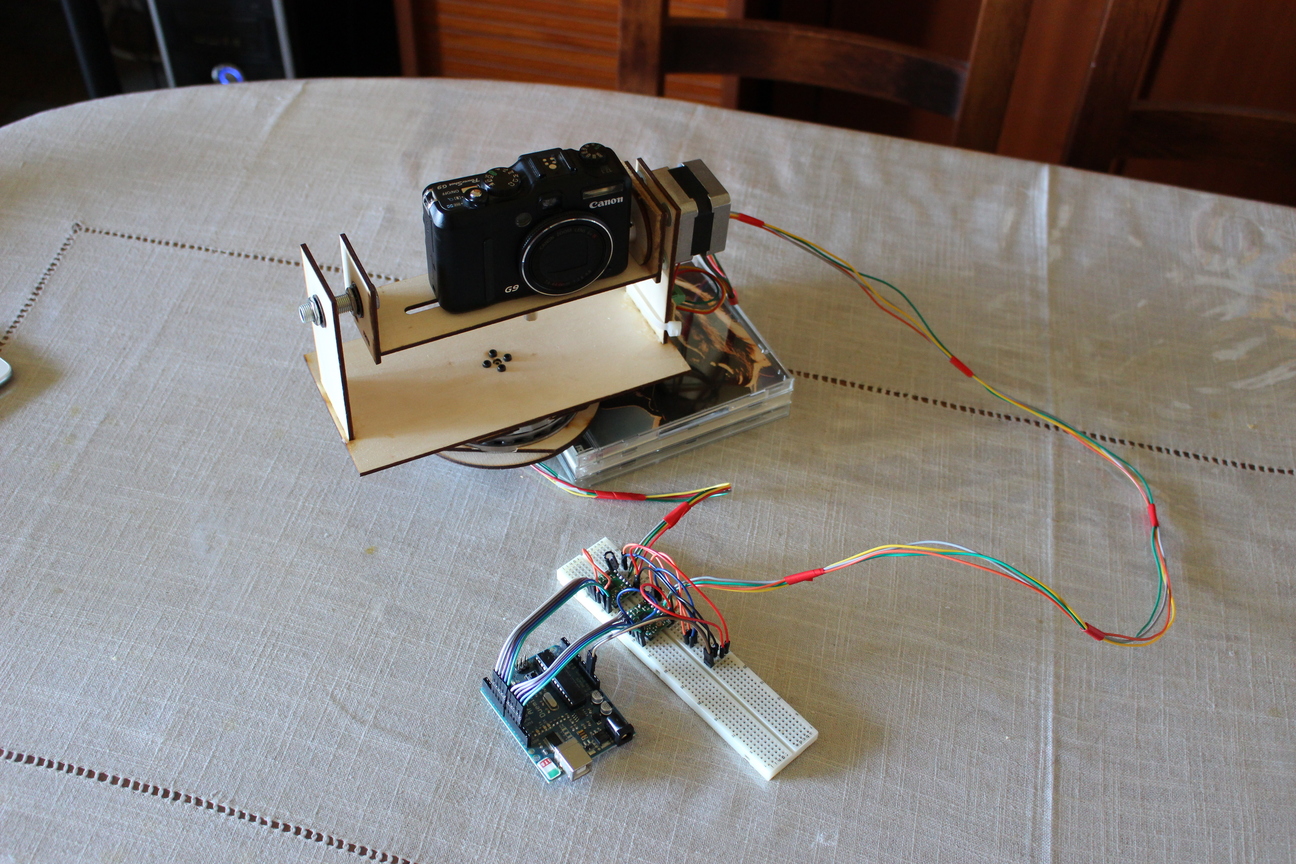
Je souhaite réaliser une petite machine permettant à mon appareil photo de tourner sur deux axes:
Je dois pouvoir régler la vitesse de rotation, l'angle de départ, d'arrivée ainsi que le “pas” de rotation.
Il est question ici du premier prototype que je réalise. Je me suis donc permis d'éviter certaines contraintes:
Ce premier prototype est réalisé avec du contreplaqué de 3mm d'épaisseur.
Voici les plans utilisé pour la réalisation de ce premier prototype. Il y a deux fichiers:
 , import à partir du fichier .dxf.
, import à partir du fichier .dxf.Dans les deux fichiers sont représentées découpes et gravures:
La gravure est utilisée pour créer des repères visuel qui serviront à coller/positionner des pièces.
Ce ne sont pas les plans que j'ai utilisés directement. Je les ai améliorés après mon montage qui a révélé plusieurs dysfonctionnement. Les quelques modifications apportées sont:
Ca vibre! Surement pour plusieurs raisons. L'utilisation de contreplaqué 3mm semble être un facteur important. Le fait que le moteur de l'axe X ne soit pas en contact direct avec son support peut aussi jouer. Mais l'un des problèmes majeur est que les roulements ne sont pas assez serrés dans leur fixation. Un roulement c'est : “monté serré sur l'axe qui tourne”. Dans ces premiers tests ce n'est pas le cas. Un coup de glu pourrait régler le problème …
Un manque de rigidité global dû à la géométrie de l'armature est envisageable.
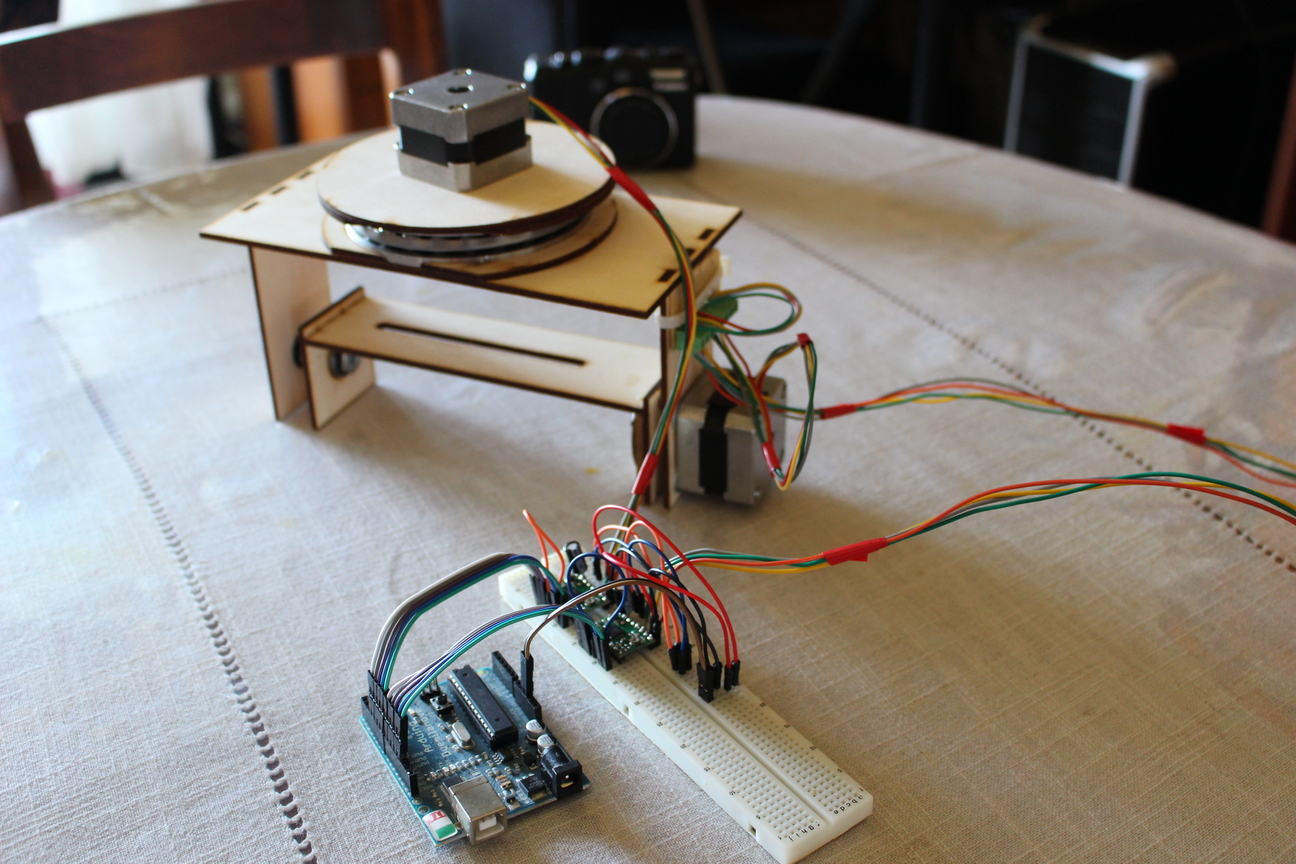
Problème d'équilibre à cause du moteur de l'axe horizontal. La construction entière penche d'un coté. Ce qui est encore plus embêtant c'est que la position du moteur évolue dans le temps lors d'une rotation sur Z. Il faut créer un vrai support.
Liste de matériel et composants nécessaires
| Nomenclature | Quantité | Remarques |
|---|---|---|
| Arduino | 1 | J'ai utilisé un “vieil” Arduino Duemilanove. |
| Pololu A4988 | 2 | Pilote de moteur PAP, un pour chaque moteur. Page constructeur. |
| NEMA17 | 2 | Moteur PAP, un pour chaque axe de rotation. Exemple chez Adafruit. |
| Moyeux pour axe 5mm | 2 | Un pour chaque moteur. !! Attention !! ceux que j'ai achetés sont taraudés dans un pas américains assez difficile à se procurer. |
| Alimentation 12v | 1 | Pour alimenter les deux moteurs et l'Arduino. Chaque NEMA17 nécessite ~350mA, donc 1A est largement suffisant. |
| Divers éléments électroniques | Petits câbles, chatterton, fer à souder, multimètre, etc… | |
| Plaque contreplaqué 3mm | 1 | Fournie par le fablab, 50*50cm. Largement suffisant. |
| Glue | Pour assembler les découpes de contreplaqué | |
| Axe (+écrous) | 1(4) | J'ai utilisé de la tige fileté creuse destiné à la fixation de luminaire trouvé en grande surface de bricolage. |
| Roulement à bille | 2 | Utilisés pour réduire les efforts axiaux sur le moteur horizontal. À choisir en fonction de l'axe |
| Butée à bille | 1 | Pour l'axe vertical |
| Vis appareil photo | 1 | Pour fixer l'appareil photo |
| Divers éléments mécaniques | Vis, rondelles, ziplock, outillage classique, etc… | |
| Port USB femelle | 1 | Optionnel, pour commander l'appareil photo. |
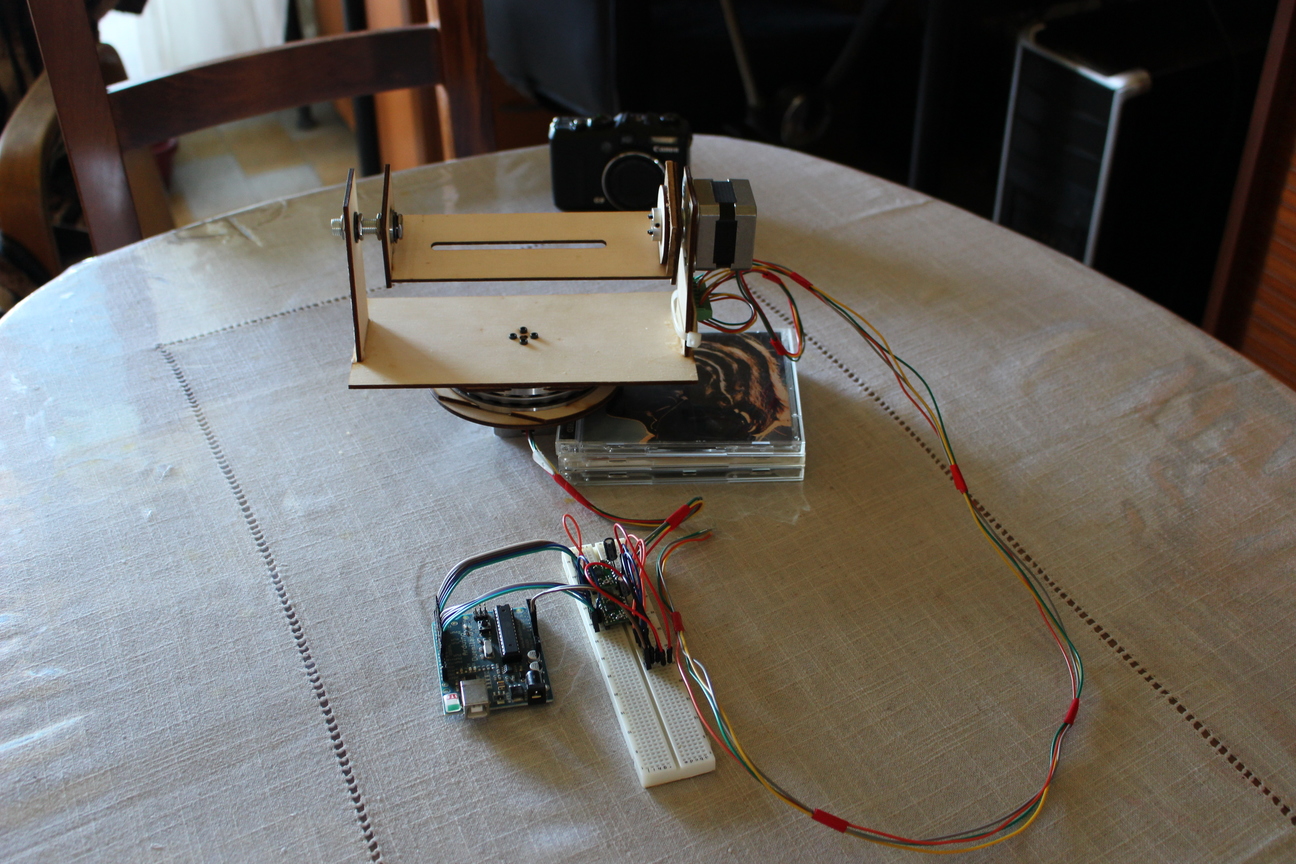
Quelques photos du prototype 0:
Une vidéo d'une des premières utilisations du prototype 0:
